Project Spiderbot
This project is my ongoing work on an Internship at IIT-D under professor Subir k. Saha.
What is Spiderbot:
Spiderbot is a biomimetic quadruped robot, which follows the creep gait to move
like a spider.
The end expectation from the robot would be an aptly sized quadruped which can locomote
on all kinds of terrains without any difficulty while camouflaging itself in the given
environment.:
Uses:
This bot can be used in a variety of scenarios
1. Surveillance in household or office environments
2. Delivery and procurement of messages or information
3. A smartbot which works like a homeautomation device
4. A testing platform for swarm robotics
5. A testing platform for different control algorithms
Work on Spiderbot - Timeline
October 2019 - First prototype made:
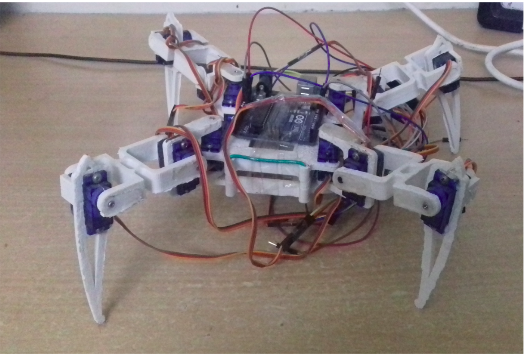
The above is the first prototype of Spiderbot I made , it took around 20 days.
Build :
-The body was 3-D printed : I tried to keep the fill density low and the design of
legs and body was such that it had minimum volume, to keep the bot as light as possible.
-Electronics : Here I have used an Arduino Uno, but I also tried making the same with Arduino Pro mini
which was successful.
- I have used sg90 servo motors for the actuation.
Difficulties faced what I learnt :
This robot when first made would Gitter a lot, after a lot of effort I realised how my power distribution
to the robot was not perfectly planned. I added a UBEC to the bot and upgraded the battery which balanced
the current supply between the motors and the bot worked properly
Working bot:
The above is another model of spiderbot I made, as you can see the bot has a tendency to rotate anti-clockwise during its motion. I am working on balance and contact modelling of the bot to resolve this.
Close view:
The above is a close up of a step. As you can see the spider falls behind at a point in between which is because the COG shifts too far behind. But this can be resolved by changing the motion planning in the code better and working on the symmetry of the robot.
Current Work:
At the moment I am working on simulation of the Robot.