Biped Locomotion Analysis - Self Excitation
This project aims to study self-excited walking of four-link biped mechanisms which are actuated
at hip joints and passive at knee joints with stoppers.
This project is based on the following two research papers-
Self-Excited Walking of a Biped Mechanism - Kyosuke Ono,Ryutaro Takahashi (Department of Mechanical and Control Engineering
Tokyo Institute of Technology)
Design of a robust self-excited biped walking mechanism - V.Sangwan, A.Taneja,S.Mukherjee (Department of mechanical Engineering, Indian institute of Delhi,New Delhi)
Design 1-

This design is of a four-link biped mechanism which is actuated at the hip joint, and has passive knee joints with stoppers. Numerical simulation shows that self-excitation allows the biped model to walk on level ground with three degrees of freedom.
Design 2 -
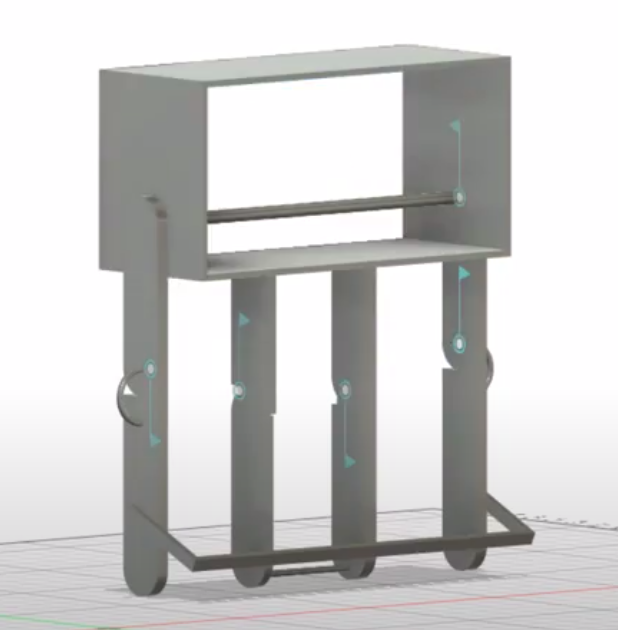
The above is another design, two legs connected at the hip joint, actuated using a servo motor.The inner links are provided for better stability.
This is an ongoing project where I am still learning self-excitation and using different Control methods for the biped to converge to a stable gait. I believe that to develop a control method for achieving natural Biped locomotion, self-excitation a great approach.